创建IK链接
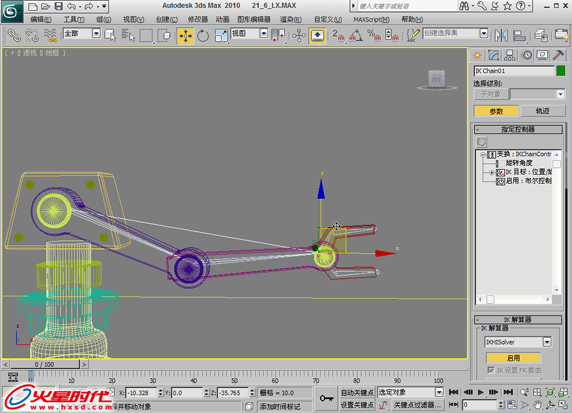
使用移动工具移动骨骼,进行链接测试,带动整个机械臂的运动,这就是反向运动的效果。
 创建IK链接
创建IK链接

 创建IK链接
创建IK链接